My academia days are behind me and that means I don’t have to write literature reviews any more. For this hobby project I would like to acknowledge other projects. I’m not claiming to have read the papers carefully and don’t expect any insightful comments. Stay for the nice videos and links to mathetmatical proofs that will melt your head.
This is not a definitive list and there will be relevant media that I have missed. I check the comments periodically so please feel free to make suggestions there. I will probably them to this page.
The video and work shown in “Realtime Trajectory Control of a Snakeboard Robot” are excellent. Am I putting this at the top because Jens Desmet cited me in his thesis? Maybe, but it is a really nice robot.
A cute little robot that does look like it can only just move under it’s own power. There is something cute about the aesthetic. Maybe I have spent too long with robots.
A wooden batten is probably not the most optimised flywheel but the robot moves and it’s definitely a snakeboard.
The hefty flywheel with narrow plates means this robot has stabilising casters at the sides. The video has a nice demostration of the turning gait. The construction is documented on an instructable page.
This promotional video was sent with some snakeboards in the early 90s. It’s bittersweet for me, people have fun, wondering if this is the future or at least pretending so for the camera. I think this video was probably the peak of snakeboard popularity.
Sam Pilgrim is pure chaotic entertainment. I’ve seen lots of videos where he does insanely difficult stuff on the jankiest of contraptions. So part of me is a little bit proud that he couldn’t figure it out, there is something I am better at than Sam Pilgrim!
I have a set of freeline skates and can just about use them. My technique is not efficient, so I struggle with any surface that’s not super smooth,
I don’t like RipStiks. They’re way more common than snakeboards these days, and whenever I try to explain what a snakeboard actually is, people assume I mean a RipStik. The motion just isn’t the same, and the freedom of movement is nowhere near snakeboard levels. Sure, they’re easier… but yes, I am absolutely gate-keeping skateboard variants.
The OG paper on snakeboard board motion from 1994. They show the use numerical simulations to show some sinusoidal based inputs for a variety of simple gaits.
There are a few websites with the history of snakeboards. I like the one on snakeboard.org. Modern snakeboarding has transitioned into a sport called streetboarding.
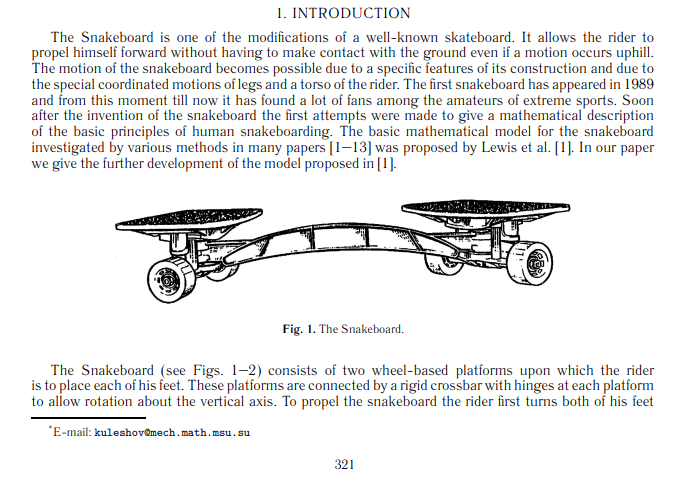
Further Development of the Mathematical Model of a Snakeboard was the paper I used most for my dissertation. The mathematical model derived within it allowed for the plates to rotate independently.
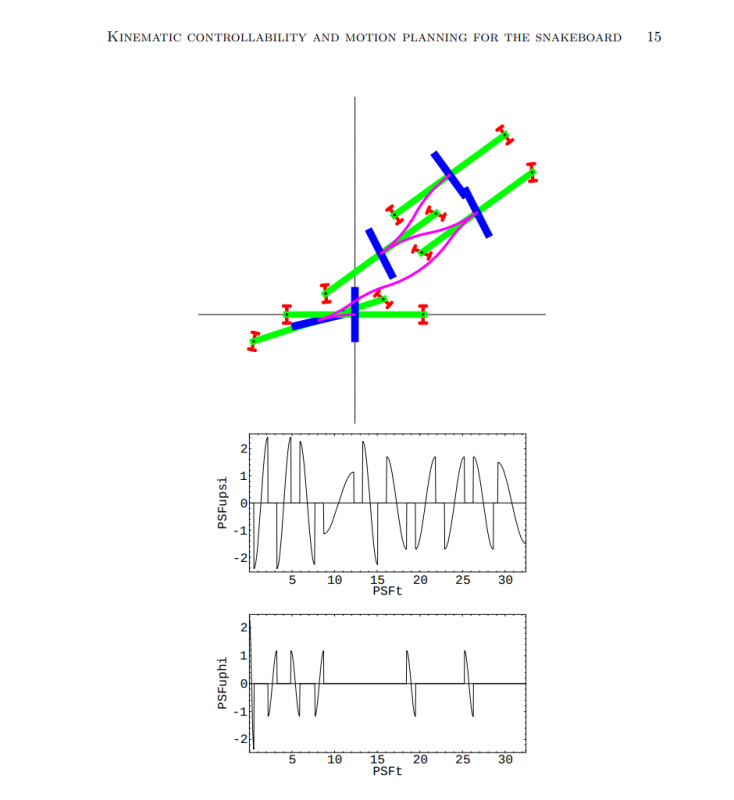
Kinematic controllability and motion planning for the snakeboard explores motion planning for snakeboard using motion primitives.
This post is part of a series on my robot snakeboard project called SnakeSkateBot:
Snakeboard Robot – Part 2: Not a literature review
My academia days are behind me and that means I don’t have to write literature reviews any more. For this hobby project I would like to acknowledge other projects. I’m not claiming to have read the papers carefully and don’t…
Snakeboard Robot – Part 1: The Prelude
A snakeboard is similar to a skateboard but the wheels are attached to pivoted platforms that can be rotated by the rider’s feet. Forward motion is generated by coordinated twisting of the body and platform angles. This is easier said…